Four Classes of Morphogenetic Collective Systems
Hiroki Sayama
In Artificial Life 14: Proceedings of the Fourteenth International Conference on the Synthesis and Simulation of Living Systems, Hiroki Sayama, John Rieffel, Sebastian Risi, René Doursat, and Hod Lipson, eds., 2014, MIT Press, pp. 320-327. Available online
Abstract
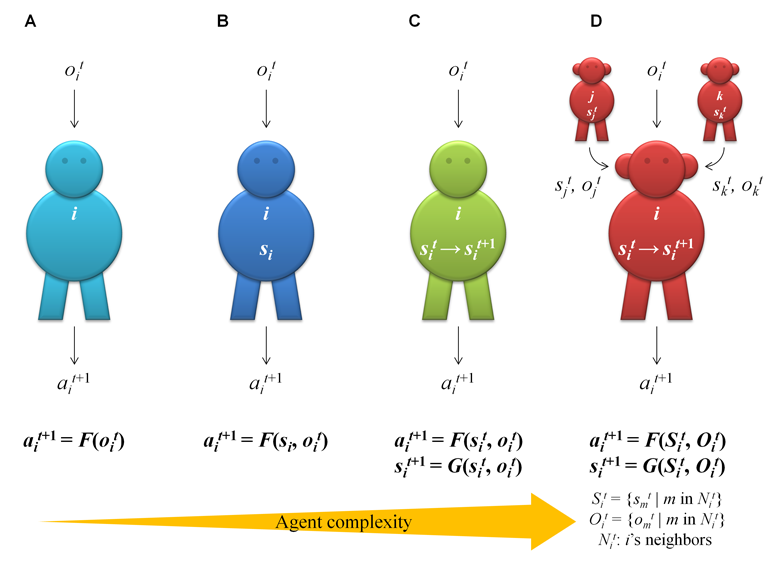
We studied the roles of morphogenetic principles-- heterogeneity of components, dynamic differentiation/redifferentiation of components, and local information sharing among components-- in the self-organization of morphogenetic collective systems. By incrementally introducing these principles to collectives, we defined four distinct classes of morphogenetic collective systems. Monte Carlo simulations were conducted using an extended version of the Swarm Chemistry model that was equipped with dynamic differentiation/re-differentiation and local information sharing capabilities. Self-organization of swarms was characterized by several kinetic and topological measurements, the latter of which were facilitated by a newly developed network-based method. Results of simulations revealed that, while heterogeneity of components had a strong impact on the structure and behavior of the swarms, dynamic differentiation/re-differentiation of components and local information sharing helped the swarms maintain spatially adjacent, coherent organization.
Galleries of Simulation Results
Class A (homogeneous collectives)
Class B (heterogeneous collectives)
Class C (heterogeneous collectives with dynamic differentiation/re-differentiation)
Class D (heterogeneous collectives with dynamic differentiation/re-differentiation and local information sharing)
© Copyright 2013-2017 Center for Collective Dynamics of Complex Systems, Binghamton University