Last Updated May 2026 Website created by Heyan Chung
Research Interests
My research focuses on mathematical optimization under uncertainty (robust optimization, data-driven optimization, machine learning–augmented optimization) for complex, large-scale problems (numerical optimization, large-scale optimization, bilevel optimization) where multiple agents compete against – and sometimes coordinate with – one another for limited resources over time (computational game theory, evolutionary game theory, dynamic optimization, equilibrium methods). Research domains include urban transportation/logistics, smart cities, supply chain management, hazards and disaster management, and healthcare operations management.
LLM-Guided Optimization for Traffic Simulation
We study large language models as sample-efficient proposal distributions for black-box optimization over heterogeneous action spaces (signal timing, lane closures, demand scaling, vehicle injection) in microscopic traffic simulation. Our testbed, LiveSUMO, couples live municipal open-data calibration (NYC and Chicago) with a goal-directed accept-or-revert loop and benchmarks LLM proposers against random, grid, and Bayesian baselines on SUMO.
Bilevel Cycling Network Design under User Equilibrium
Strategic cycling-infrastructure investment is formulated as a bilevel program in which the planner's discrete budget decisions interact with cyclist route choice through a stochastic user equilibrium with elastic demand over heterogeneous cyclist types (strong, confident, interested-but-concerned). The resulting MPEC is solved via a sensitivity-based outer loop with a machine-learning–augmented surrogate, extending core-set optimality bounds to the variational-inequality follower setting and enabling city-scale application (New York City's 2,000+ census tracts, >1M OD pairs).
PARADIS: Discovering Braess's Paradox in Real Urban Networks
PARADIS (Paradox-Aware Reinforcement Learning and Autonomous Digital Twin Infrastructure for Sustainable Mobility) is a hybrid equilibrium-and-learning digital twin for discovering Braess-like infrastructure paradoxes in real urban road networks. The framework couples classical user-equilibrium screening (Frank–Wolfe) with multi-agent reinforcement learning (PPO) to identify links whose removal robustly improves system performance under realistic, app-guided driver behavior — bridging stylized congestion-game theory with operational planning at the scale of NYC's Manhattan corridor.
Drone-truck Combined Operations
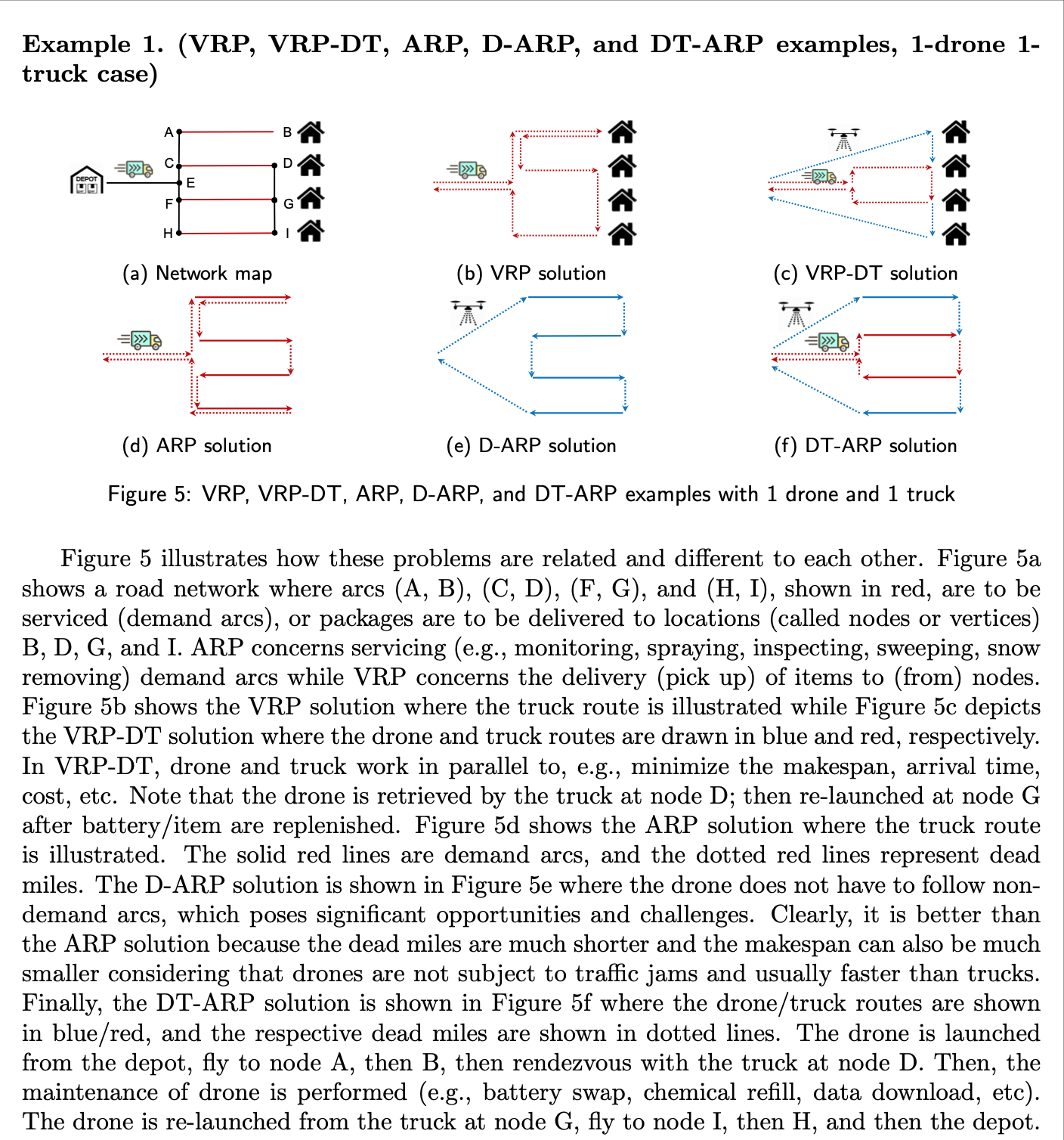
Arc Routing Problems for Combined Drone-truck Fleets
This research contributes to national prosperity by advancing planning methods for combined drone/truck fleets to serve critical societal needs, such as energy transmission infrastructure monitoring, urban police patrolling, rural and suburban mail delivery, roadway pavement inspection, and traffic monitoring. Despite the significant opportunities offered by drones for remote operations, their limited flying time and small battery capacity hamper large-scale operations. Coordination between drones and roadway-dependent motor vehicles, such as trucks, can help resolve these issues by providing batteries and payload required for continued drone services. This project will provide a novel approach to cover large service areas using combined drone/truck fleets. This award highlights the societal applications characterized by combined ‘arc’ routing, for which existing routing methods
cannot provide adequate decision-making tools. In particular, this project will validate the methods developed through a case study involving surveillance of electric power transmission lines, the backbone of the nation’s energy infrastructure. This project will train the future workforce in computational operations research and develop open-source software packages to support the further use of unmanned vehicles. The project will advance our understanding of arc routing problems in combined drone/truck fleets by developing computational optimization models and algorithms. The combined drone/truck arc routing problem is fundamentally different and significantly more challenging than traditional arc routing problems because drones can fly directly from one point to another point in the network without following ground arcs. In addition, a drone may serve only part of an arc due to its limited capacity and footprint, or potentially multiple distinct routes covering the entire arc. The optimal routing of mobile hubs served by trucks must also be incorporated into this already challenging problem. Furthermore, a drone may
launch from one truck and return to another truck if beneficial; therefore, synchronization between drones and trucks plays a significant role. This project will provide a novel mixed-integer linear programming formulation and adaptive heuristics based on decomposition, dynamic programming, partitioning, large neighborhood search, and machine learning for efficient operations of the combined fleets. The models and algorithms will be validated with actual data from power transmission line monitoring.
Types of mixed fleet problems
Examples
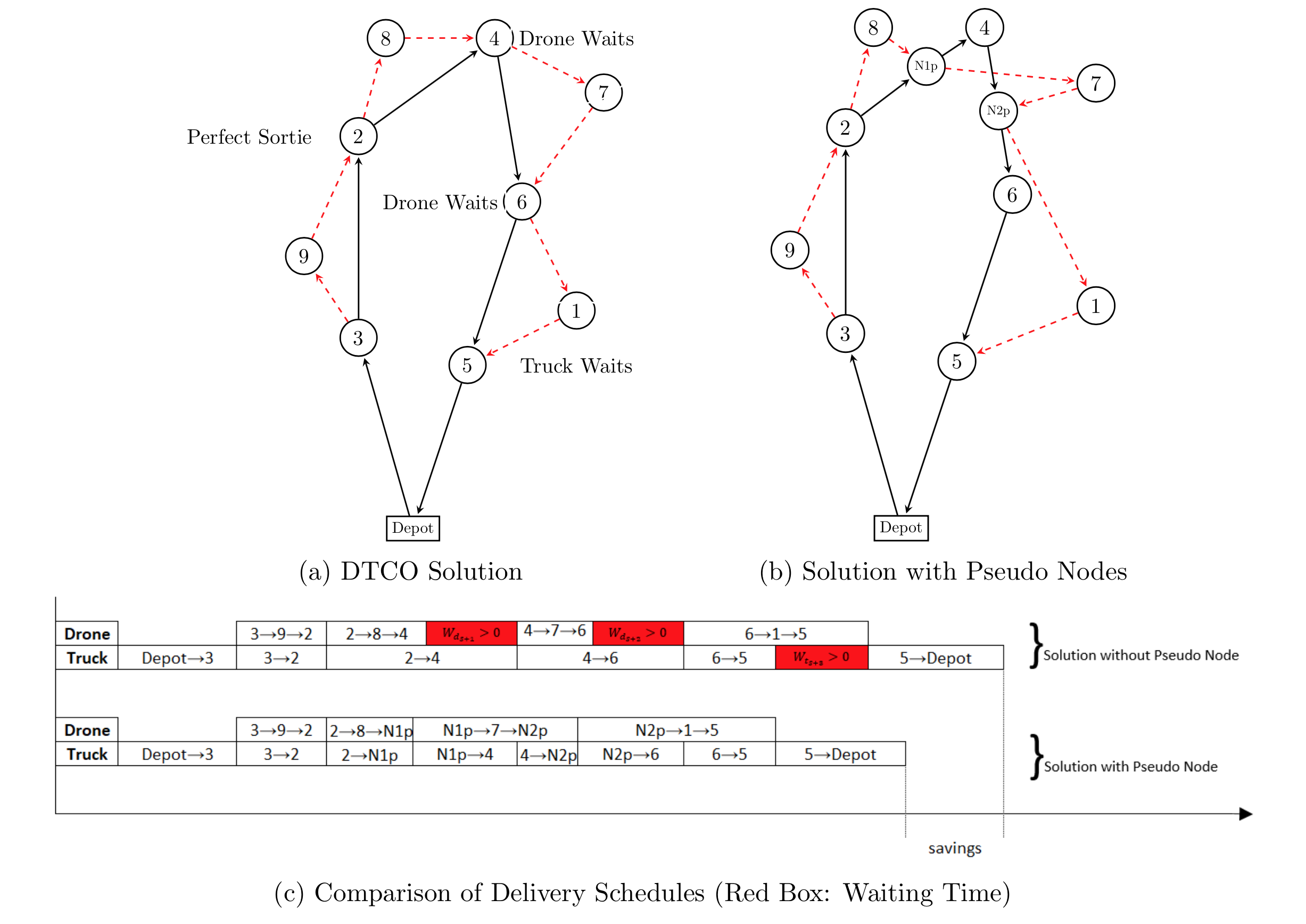
Pseudo Node Insertion Method
The advantage of a drone-truck mixed fleet operations in last-mile logistics can be summarized in two folds: 1) enabling faster pick-up/delivery of items and 2) expanding operation areas beyond the range that could be achieved by using only one type of vehicle. The drone-truck combined operation (DTCO) solutions are based on truck routes and locations, usually customer nodes, where drones depart from and return to trucks. Since synchronous rendezvous of both vehicles can be very rare, these solutions may contain waste time caused by waiting of one vehicle for the other. In this research, a pseudo node insertion method is proposed to make DTCO more efficient by resolving the drone-truck asynchronization issue. Pseudo nodes are created at the point where a drone and a truck can meet simultaneously. We present a detailed method to calculate the location of the pseudo node, and provide a detailed analysis for the travel completion time saving conditions. Furthermore, we explore a variety of scenarios to enhance the efficiency of DTCO by way of inserting pseudo nodes. An algorithm for the pseudo node insertion method is provided, and numerical examples are presented to discuss efficacy and efficiency of our proposed approach.
In the above figure, the DTCO solution is shown in (a), which can be improved by way of inserting pseudo nodes as shown in (b). The travel completion time is analyzed in (c) for both problems, where the red boxes show the waiting time. It is clear that the travel completion time is effectively reduced if the pseudo nodes are used.
Survey of Optimization Methods for Drone-truck Combined Operations
We survey the state-of-the-art optimization approaches in the civil application of drone operations (DO) and drone-truck combined operations (DTCO) including construction/infrastructure, agriculture, transportation/logistics, security/disaster management, entertainment/media, etc. In particular,
we review ongoing research on various optimization issues related to DO and DTCO including mathematical models, solution methods, synchronization between a drone and a truck, and barriers in implementing DO and DTCO. First, we introduce DO and DTCO and their applications,
and explore some previous works including survey papers. In addition, we survey the state of the art of DO and DTCO studies and discuss the research gaps in the literature. Furthermore, the detailed review of DTCO models and solution methods are reviewed. Finally, future research directions are discussed. All the reviewed papers are summarized in an Excel file, which can be downloaded here.
(PI, 100%) Using drones to disinfect urban streets and protect the most vulnerable population from the spread of COVID-19, funded by SUNY RF, 4/2020-12/2020
(PI, 100%) Systematic and Integrated Framework for Advancing the Management of Dynamic, Complex, and Interdependent Systems, funded by Material Handling Institute, 2/2018-12/2019
(PI, 50%) Investigating the Potential of Dynamic Wireless Charging Techniques for Continuous Electric Forklift Operations, funded by Toyota Material Handling North America University Research Program, 1/2017-1/2018
(Co-PI, 50%) Studying Lift Truck Driver Behavior and Warehouse Congestion Using Informatics and Analytics Methods, funded by Toyota Material Handling North America University Research Program, 1/2017-1/2018
(Co-PI, 50%) Re-Engineering of Operations at Laufer Group International, funded by Laufer Group International, 10/2016-09/2017
(PI, 100%) Adaptive Vehicle Routing for Evacuation under Uncertainty, funded by U.S. Department of Transportation through University Tranportation Research Center, 09/2016-12/2017
Sah, B., M. Moshref-Javadi, and S. H. Chung, 2024, "Multiple Drone and Truck Combined Operations," International Journal of Operational Research, forthcoming.
Li, Y. and S. H. Chung, 2020, "Ride-Sharing under Travel Time Uncertainty: Robust Optimization and Clustering Approaches," Computers & Industrial Engineering, 149, 106601.
Hailemariam, D. A., X. Shan S. H. Chung, M. T. Khasawneh, W. Lukesh, A. Park, and A. Rose, 2018, "Developing an Appropriate Staff Mix for Anticoagulation Clinics: Functional Job Analysis Approach," Journal of Industrial Engineering International, 15(1), 103–118.
Al-Mashraie, M. and S. H. Chung, 2016, "Customer Churn Prediction in Telecommunication Industry: A Case Study," Proceedings of the 2016 Industrial and Systems Engineering Research Conference, Anaheim, CA, May. 21-24.
Kohtz, S., S. H. Chung, Y. Li, and N. Sawant, 2016, "Evacuation Planning for Urban Areas Using Public Transit Systems," Proceedings of the 2016 Industrial and Systems Engineering Research Conference, Anaheim, CA, May. 21-24.
- SSIE 672X, Dynamic Programming and Reinforcement Learning, Fall 2026 (new course)
Courses Taught
- Applied Probability and Statistics - Integer Programming - Modeling and Simulation - Operations Management and Supply Chains - Stochastic Systems
Last Updated May 2026
Computational Operations Research & Engineering (CORE) Laboratory
The CORE laboratory in the School of Systems Science and Industrial Engineering at Binghamton University, the State University of New York, is located in EB S03.
- Dr. Sung Hoon Chung, Principal Investigator - Ademola Adedoyin, Ph.D. Student - Antoine Stewart, Ph.D. Student - Saif Al-Nimer, Ph.D. Student - Vishal Parthasarathi, M.S. Student
Alumni
Ph.D.
- Emad Alenany, Ph.D., 2022, Arc Routing Problems for Drone-Truck Fleets - Joseph Chery (Co-Advisor), Ph.D., 2021, An Improvement Factor-based Multistep Cost Estimation Model - Shadi Al-B'ool (Co-Advisor), Ph.D., 2021, A Tabu Search Algorithm for Patient Admission Scheduling - Mohammed Al-Mashraie, Ph.D., 2021, Now Senior Innovation Specialist, Albany Medical Center - Bhawesh Sah, Ph.D., 2019, Now Visiting Assistant Professor at Northeastern University - Yinglei Li, Ph.D., 2017, Now Senior Data Scientist at Breakthrough Fuel LLC
- Eric Ting, BS, 2024 - Ting Wong, BS, 2021 - Abel Portorreal, BS, 2017 - Sara Kohtz, BS, 2016
News
- Liu, Chung, and Kwon publish "An Adaptive Large Neighborhood Search Method for the Drone-Truck Arc Routing Problem" in Computers & Operations Research, 2025
- Saif Al-Nimer and S. H. Chung present "Drone-Truck Arc Routing Problem" at INFORMS Annual Meeting, Atlanta, GA, October 2025
- Tripura Arepalli and Dhana Sri Rudrakshala complete their M.S., 2025
- Dr. Chung receives an Individual Development Award, March 2024
- Sah, Moshref-Javadi, and Chung's "Multiple Drone and Truck Combined Operations" accepted in International Journal of Operational Research, 2024
- Chung, Sah, and Lee publish "Pseudo Node Insertion Method for Synchronization in Drone-Truck Combined Operations" in Computers & Industrial Engineering, 2024
- Emad Alenany and S. H. Chung present "Multiple Drone Arc Routing Problem" at INFORMS Annual Meeting, Seattle, October 2024
- Emad Alenany and S. H. Chung present "The Drone-truck Arc Routing Problem" at IISE Annual Conference, Montreal, Canada, May 2024
- Dr. Chung delivers invited seminars at Christ University Delhi and VIT Bhopal, India, March 2024
- Shraddha Patil and Daniel Fee complete their M.S., 2023
- Bhawesh Sah and S. H. Chung present "Mixed Fleet Routing Problems" at INFORMS Annual Meeting, Phoenix, October 2023
- Dr. Chung delivers invited seminars at VIT Bhopal, India, November 2023
- Dr. Chung's research featured in BU Magazine article "Getting There Faster and More Sustainably," June 2022
- Dr. Chung promoted to Associate Professor with tenure, August 2022
- Kwon and Chung's "Drone-truck Arc Routing Problems" chapter published in the Encyclopedia of Optimization (Springer), 2022
- Emad Alenany successfully defends his Ph.D. dissertation, 2022
- Amogh Malekar, Rushikesh Anap, and Solomon Barer complete their M.S., 2022
- Alenany and Chung present "The Drone-truck Arc Routing Problem" at INFORMS Annual Meeting, Indianapolis, October 2022
- Joseph Chery successfully defends his Ph.D. dissertation, 2021
- Shadi Al-B'ool successfully defends his Ph.D. dissertation, 2021
- Mohammed Al-Mashraie successfully defends his Ph.D. dissertation, 2021
- Two master students, Ingyu Lee and Saraswathi Hathikal, join the CORE laboratory, January 2017
- Dr. Chung receives a research grant from Laufer Group International, October 2016
- Eman Banimustafa, a master student, joins the CORE laboratory, October 2016
- Farouq Halawa, a Ph.D. student, joins the CORE laboratory, September 2016
- Three master students, Yue Zhang, Rajat Dhiman, and Vinay Ghandi, join the CORE laboratory, September 2016
- Dr. Chung receives a research grant from U.S. Department of Transportation, August 2016
- Abel Portorreal, an undergraduate student, joins the CORE laboratory as a McNair scholar, May 2016
- Namrata Shetty, a master student, joins the CORE laboratory, April 2016
- The research team (Sara Kohtz, Prof. Chung, Yinglei Li, and Neha Sawant) receives the Best Track Paper Award at the ISERC 2016, April 2016
- Yinglei Li receives the Best Student Paper Award at the ISERC 2016, April 2016
- Professor Chung receives an Individual Development Award, January 2016
- Sara Kohtz, an undergraduate student, joins the CORE laboratory, September 2015
- Professor Chung receives a research grant from U.S. Department of Transportation through University Transportation Research Center (UTRC), April 2015
- Yinglei Li receives a Sustainable Communities TAE Graduate Student Research Grant, March 2015
- Professor Chung receives an Individual Development Award, January 2015
- Yinglei Li, a Ph.D. student, joins the CORE laboratory, January 2015
Using drones to disinfect urban streets and protect the most vulnerable population from the spread of COVID-19, funded by SUNY RF
Systematic and Integrated Framework for Advancing the Management of Dynamic, Complex, and Interdependent Systems, funded by Material Handling Institute
Investigating the Potential of Dynamic Wireless Charging Techniques for Continuous Electric Forklift Operations, funded by Toyota Material Handling North America
Studying Lift Truck Driver Behavior and Warehouse Congestion Using Informatics and Analytics Methods, funded by Toyota Material Handling North America
Re-Engineering of Operations at Laufer Group International, funded by Laufer Group International
Adaptive Vehicle Routing for Evacuation under Uncertainty, funded by U.S. Department of Transportation through UTRC
Warehouse Modeling, Operations Management, and Analytics, funded by Bennett Distribution Services
Disaster Relief Vehicle Routing under Uncertainty, funded by U.S. Department of Transportation through University Transportation Research Center (URTC)
Functional Job Analysis of Anticoagulation Clinic Staff, funded by New England Veterans Engineering Resource Center (VERC)
Research in RMA Process Setup, funded by Google
Sponsors
In the Media
- The CORE lab's research is featured in BU Magazine, September 2019
- The CORE research team's research is featured in ISE Magazine, July 2019
Dissertation Advice for PhD students - Michael Manove (This is written for Economics PhD students but it's still useful for students with other majors.)
General Graduate School Survival Guide and Early Career Development