
"Our brains make the world smart so that we can be dumb in peace!"
--Andy Clark

"Viajador en Megapteras". Carlos Gershenson, Mexico City, 1999. Ink on paper.
As we have seen in Chapter 2, in most theories involving artificial societies of agents, the agents are rational (Hogg and Jennings, 1997; Jennings and Campos, 1997), or at least cognitive (Castelfranchi, 1998). This means that their behaviour is guided by logic rules manipulating knowledge representations (Shoham and Tennenholtz, 1995).
In this chapter we will see that it is possible to observe intelligent (1) social behaviour without the need of knowledge representation. This is because we will use agents with emergent cognition, provided by BeCA. We will propose a model where complex social behaviour will emerge from simple social actions.
"I knew they would follow us..."
--Nadia Bazlova
Our model for social action is very simple. It is based in the idea of imitation and induction (I&I) of behaviours. These will be the only social actions among individuals of a society. When an individual perceives another individual performing some kind of behaviour, he might imitate the other if the imitation is beneficial for him in some sense. On the other hand, an individual will try to induce the behaviour to the other individuals he is perceiving, who in turn might or might not imitate him. Induction, in this case, is an insinuation for imitation. An induced behaviour needs to be imitated to be executed by the induced individual. An imitation would be a weak social action (Castelfranchi, 1998), because the imitating individual bases his imitation in his beliefs about the behaviour of the imitated individual. An induction would be a strong social action (Castelfranchi, 1998), because the inducer tries to make the induced to execute the same behaviour that he is executing.
In animals, most imitated behaviours seem to be reactive behaviours: e.g. flock and school formations, stampedes, crowd behaviour. But motivated behaviours may also be imitated. For example, if an animal perceives another one with such a locomotion pattern that he knows that he is approaching food, if he is hungry, he will follow him, but if he is not, probably he will not pay attention to the other animal. Another example would be a Thompson's gazelle that sees other Thompson's gazelles speeding her way, presumably fleeing from a predator. She will not wait until she sees the predator, she will assume there is a predator coming and flee as the other gazelles. Of course this might lead to collective misbelief. We can see in animals examples of induced behaviour also. For example, honeybees induce other honeybees to follow their route to a food source. Some gregarious mammals might warn other members of their group when danger is near.
In animals, most induced behaviours seem to require a language, while imitated behaviours seem not to need one. This is because the inducer needs to send information to the individual(s) he is trying to induce; whereas perception gives the information required for imitation.
In natural systems, complex social behaviour may emerge from only imitation and induction of behaviour. For example, during a traffic jam, if one driver honks his horn, probably his action will be imitated, and the new honks will be also imitated (not ad infinitum), provoking a lot of noise, causing not much pleasure in the drivers. The clapping in audiences seems to work in a similar way. If one person begins to clap, then others tend to follow, and a general acclamation emerges in a chain reaction style. On the other hand, if no one claps, it is harder that someone will start clapping, or clap for a long time, because he is inhibited by the behaviour of the rest of the audience. So, mass approval or disapproval of events emerges in a complex way, depending on the imitation or non imitation of behaviours. Laughing also might be an induced behaviour. A joke is always funnier if there are a lot of people laughing around you. Or what for the recorded laughs in comic shows?
Induction and imitation of behaviour give individuals the possibility to socialize though some form of communication. Without communication, there is no society, only selfish individuals trying to survive by themselves, ignoring everyone else. And without society, no culture can evolve.
In our model, inspired in personal empirical observations, when another individual is perceived, his behaviour is taken into account in the action selection process, making equivalent the perceived behaviour to the external stimulus that motivated it. For example, if an individual perceives another approaching food or eating, it will be equivalent as if he had perceived food (which motivates the behaviours "approach food" and "eat"). If an individual perceives another one fleeing, it will be equivalent to the perception of an aversive stimuli (e.g. a predator). In Figure 15 we can see graphically this idea. We can formalize this as follows:
![]() (15)
(15)
where PRi is the perception of stimulus i by the receiver, which is increased by behaviour j related to stimulus i perceived in "sender" k, and lamedk (lamed) is the imitation factor related to individual k.
For induction the idea is very similar. When an individual perceives another, he will try to induce his behaviour to the other, as if the other would be imitating him. This is, the inducer will send to the induced a signal representing the stimulus that motivated the inducer's behaviours. We can formalize this as follows:
![]() (16)
(16)
where PRi is the perception of stimulus i by the induced receiver, which is increased by the behaviour j of inductor k related to stimulus i, lamedk (lamed) is the imitation factor related to the inductor k, and yud (yud) is the induction factor of the inductor (sender) k. We can see graphically this idea in Figure 16.

An individual with a higher value of yud will have a higher probability to induce his behaviour to others. In other words, he would be a leader (in comparison to individuals with a lower value of yud). On the other hand, individuals with low values of lamed will have a lower probability of imitating other individuals or being induced by other individuals. This makes them less social. Therefore, we can see lamed as a sociality parameter.
The successful imitation and induction of behaviours depend on the ASM or BPS, the reactiveness and motivation degree of the behaviour, the internal state of the individual, and his perceived scenario. Our model only provides the information of the behaviour executed, but this information should go through a control process as any other information received by the perceptual system.
We can see that with this simple model, for different values of lamed and yud we can have a wide variety of complex social behaviours and systems, also depending on many other circumstances, such as the capabilities of the individuals, and the state of their environment.
We have seen that in our I&I model the lamedk variables determine the strength of the imitation of the behaviours executed by individual k. So, if we increase the lamedk value, the individual will have a higher probability to imitate individual k, and if we decrease it, the individual will have a lower probability to imitate individual k, and he will never imitate him if the value of lamedk reaches zero. If lamedk is lesser than zero, we could say that the behaviour would tend to be antisocial towards individual k (the imitator would be inhibited in executing the behaviour that individual k is executing).
We will apply a simple modification criteria. First, the modification will only take place if there are internal needs in the individual. This is based on animal behaviour, where conditioning can only take place when there are internal needs (Pavlov, 1927). So, if the individual has internal needs, and he is perceiving individual k, lamedk will be modified. If he performs the same behaviour as the one perceived in individual k, lamedk will be increased. If he performs a different behaviour, lamedk will be decreased. The increase and decrease formulas are written in expressions (17) and (18).
 (17)
(17) 
 (18)
(18) 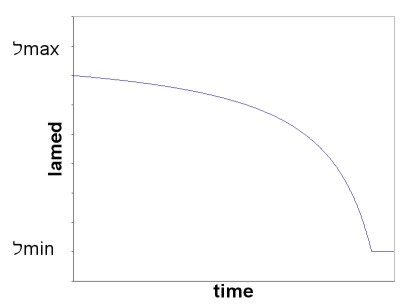
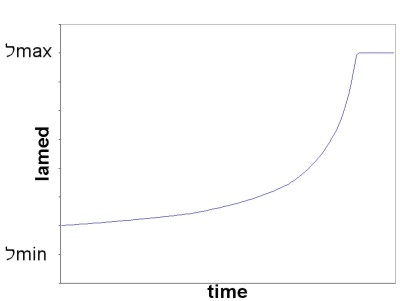
where dalet (dalet) determines the length of the divergence and reysh (reysh) determines the speed of the divergence of lamed bounded between lamedmin and lamedmax. Expression (17) can be seen as a hyperbolical divergence from lamedmin, as seen in Figure 17, and expression (18) as a hyperbolical divergence from lamedmax, as shown by Figure 18. The parameter alfai in BeCA is adjusted using similar expressions (3) (Gershenson and Gonz�lez, 2000). Because of the hyperbolical divergences, once a lamedk value reaches the neighbourhood of either lamedmax or lamedmin, it will be difficult that it will leave the neighbourhood. Therefore, for low values of dalet and/or high values of reysh, there is a strong dependence on the initial conditions.
The hyperbolical divergences simulate a persistence of the imitation factor over time, so that it does not jump linearly every time the individual imitates or not a behaviour. This gives a smoother transition of the values of lamedk, and it makes lamedmax and lamedmin to be attractors.
"Now they were simple black dots, ordered in a capricious manner, animated with collective life"
--Boris Vian, in "L'arrache-cœur"
I&I is a very simple model for social action, where many social behaviours and processes emerge by the sole induction and imitation of behaviours.
Many properties emerge with I&I, depending on the ASM or BPS which controls the individuals in a society interacting through I&I. This is, if the BPS presents a lot of emergent properties, they will be able to be combined with the properties of I&I, providing a large number of specific emergent social behaviours, depending on the BPS and the social environment.
I&I is a context-free model for social action. Since it is defined in a generic way, it can be implemented in any group of adaptive autonomous agents, in order to make them social.
I&I models both weak social action and strong social action (Castelfranchi, 1998).
I&I can model emergent social hierarchies, by setting different imitation and induction parameters (lamed and yud, respectively).
The degree of sociality of an individual can be regulated with the imitation parameters (lamedk's).
There is emergence of group beliefs (Tuomela, 1992) and misbeliefs (Doran, 1998).
The learning of the imitation parameters (lamedk's) provides the model with social adaptation.
The wide repertoire of properties, mostly emergent, in such a simple model, allows us to try to understand and control better social processes and phenomena. When such a model is implemented in an artificial society, the possibilities of study and experimentation offer many advantages over natural societies, basically because in an artificial society one can control experiments in a much more precise way than in a natural one.
"Every social regime creates problems"
--Kenneth Arrow
Our I&I model has very simple rules, but in experiments developed (to be shown in Section 6.2), we have seen that the social behaviours simulated are quite complex. Our artificial societies emerge from the imitation and induction of behaviours.
One of the main conclusions obtained after experimenting with I&I is that a society, as it evolves, is shaped more by its environment, than by the individuals themselves. Of course, the society can also influence individuals.
Another interesting property that emerges from our model is group beliefs (Tuomela, 1992) and misbeliefs (Doran, 1998). When an individual imitates another, he believes in the individual he is imitating. This can lead to group beliefs or misbeliefs.
Also, we were able to see with our model that if an individual A is not social towards individual B, most probably he will also not be social towards all the individuals of B's social group. This can lead to the emergent formation of different social groups.
In the next chapter we will introduce our Behaviours Virtual Laboratory, where the mentioned experiments were carried out.
1. See Section 1.1.1.
2. Part of this work was presented in the poster "Action Selection and Weak Social Action" in the Third International Conference of Complex Systems, in Nashua, NH, May 2000.
3. See Section 3.8.2.
Carlos Gershenson