"We have to be unmerciful without falling into cruelty"
"Les Trois Ombres". Carlos Gershenson, Hôtel Biron, Paris, 2000. Gel on paper.
In this chapter (1) we will present the properties our Behaviours Virtual Laboratory (BVL). We will first describe virtual labs and in the following sections we will describe the components of ours: the virtual environment, the animats, and the interface.
We programmed our BVL in Java, using its External Authoring Interface (EAI) to control objects on a VRML world. This allows users to access the BVL through the Internet.
Our BVL can be accessed and/or downloaded (source code included) in the URL https://bingweb.binghamton.edu/%7Ecgershensong/unamjlagunez/asia/bvl
Virtual laboratories have been developed in different areas, to reproduce experiments that were made in physical laboratories. Virtual labs are useful for prepractice and postanalysis of experiments developed in physical labs, and in some cases they can replace the physical lab itself. Although virtual labs may have many limitations, they have many advantages over physical labs. For example, some physical labs have scarcity of resources (in equipment and staff), limiting the researcher's performance. Virtual labs have relatively low costs, experiments can easily be repeated, and there are no inconveniences in failing experiments, because the virtual environment is controlled, and there are no risks for natural systems. It is desirable that virtual labs exploit the advantages of virtual reality, multimedia, and the Internet. Virtual labs have been developed for different areas, such as physics, electronics, robotics, physiology, chemistry, engineering, economics, and ecology.
We believe that there should be also development of virtual labs in the area of ethology. We name these Behaviours Virtual Laboratories (BVL). This development would benefit both ethology and behaviour-based systems. To ethology, a virtual lab would help reproduce with ease experimental and natural conditions that could take even weeks to develop in a physical lab. For example, some kinds of conditioning in animals take days of training, while in a virtual lab, this process may be accelerated, saved, and recovered. For artificial intelligence researchers, a virtual lab would help design and test systems and mechanisms of robots, software agents, or animats.
A BVL should be capable of achieving the same conditions that are found in an ethology physical laboratory, and even provide better development of the experiments. A Behaviours Virtual Laboratory would be useful to design bottom-up autonomous agents or robots, propose and test animal behaviour theories, reproduce behaviour patterns from experimental data, and easily produce lesions in different structures and mechanisms of the animats, amongst other questions. Unlike other types of virtual labs, a BVL should be capable of producing unpredictable results, allowing emergent behaviours to arise. With all these properties, a BVL should induce researchers to "think adaptively". This is, to easily show the properties and characteristics of adaptive behaviour, without the need of complex experimentations or heavy research, in an interactive way.
Examples of works related to behaviour virtual laboratories are the Simulated Environment developed by Tyrrell (Tyrrell, 1993), which tests different proposed action selection mechanisms; and Beer's Simulation of Cockroach Locomotion and Escape (Beer and Chiel, 1993), which allows to lesion different neuronal structures of the insect.
Following these ideas, we developed a Behaviours Virtual Laboratory, in which animats and simple animat societies can be simulated, having in mind three goals: First, to test and analyse the properties of the Behavioural Columns Architecture (BeCA) (González, 2000). Second, to test an analyse our Imitation and Induction (I&I) model for social action. And finally, to provide a useful tool for biologists, sociologist, and roboticists to experiment with the adaptive and social behaviours that BeCA and I&I, respectively, are able to simulate.
"The environment is not best conceived solely as a problem domain to be negotiated.
It is equally, and crucially, a resource to be factored in the solutions."
--Andy Clark
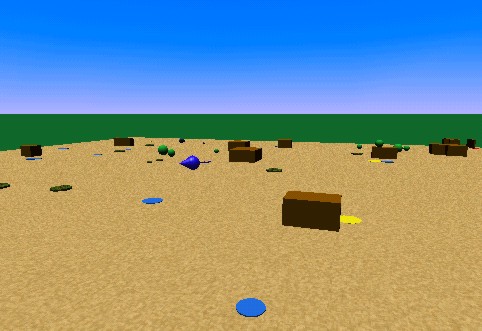
The virtual environment is defined by a plane (z, x) of a space (x, y, z), limited by a frame. In the area defined by this frame different objects can be created. These objects represent the following external stimuli: food (green spheres), water (blue circles), grass (texturized green circles), fixed obstacles (brown parallelepipeds), blobs (black ellipsoids), and other kinds of stimuli that initially have no specific meaning for the entity (red and yellow circles). The frame that defines the plane (z, x) is also considered as a fixed obstacle. The animats perceive these stimuli, and act upon them. Figure 19 and Figure 20 show aerial views of the simulated environment.
We developed animats of two kinds: predators and preys. Predators chase, kill, and eat preys, and preys run away from the predators. Our initial intention was not to reproduce the behaviour of specific species of animals, but to model general properties found in animal behaviour.
The internal structure of each animat can be described in terms of four basic components: the perceptual system, the internal medium, the behaviours production system (BeCA), and the motor system. Animats communicate and socialize using I&I.
"The world is my representation"
--Artur Schopenhauer
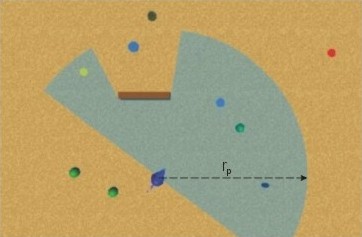
The perceptual system first registers stimuli that are in the perceptual region (Rp) found in the plane (z, x) of the space (x, y, z) defined by the half-circle of expression (19):
 (19)
(19)
where (za, xa) is the position of the animat, theta its orientation in radians, and rp is the radius of the half-circle (the radius of perception). After this, the perceptual system eliminates the stimuli that are found behind obstacles, as shown in Figure 21, determining the "perceived scenario". The stimuli found in the perceived scenario are pondered as a ratio between the magnitude of the stimulus and its distance from the animat. If a stimulus leaves the perceived scenario, then the pondered value (Fe) decreases in terms of the parameter aleph, as shown in expression (20):
![]() (20)
(20)
Expression (20) simulates a short-medium term memory. The "remembered" stimuli conform the animat's "remembered scenario". All the stimuli found in the perceived and remembered scenarios are registered in BeCA by the exteroceptors.
The internal medium is defined by a set of variables which can take values between zero and one, representing strength, lucidity, safety, fatigue, thirst, and hunger. The size of the angular steps of the animat is proportional to his strength, while his radius of perception is proportional to his lucidity. The safety value does not change in time; but fatigue, thirst and hunger are increased in time (or decreased if a proper consummatory behaviour is executed). When these last three internal needs are high, strength and lucidity are decreased, and when they are low, strength and lucidity are increased. When strength is equal to zero, the animat dies. A prey animat might also be killed by a predator, which feeds himself decreasing the prey's strength value. When this reaches zero, predators cannot longer feed themselves from the hunted prey.
The internal medium of the animats is perceived by the interoceptors of BeCA.
The animat's movement is commanded by angular steps alfa and beta, with a centre in the extremes of the diameter of the projection of the sphere of the animat in the plane (z, x), as shown in Figure 22.
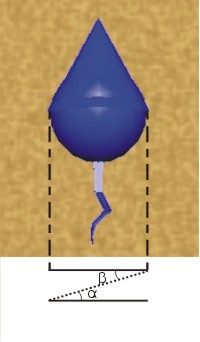
When the angular steps alfa and beta are equal, the animat follows a straight trajectory.
The motor system receives signals from BeCA through the actuators, and can execute the next behaviours: wander, explore, approach (to different stimuli), eat, drink, rest, runaway (from different stimuli), and the reflex behaviour avoid obstacle.
Each animat has a behaviours repertoire. This is the set of behaviours that BeCA is able to select depending on the internal state and on the perceptions. Table 2 shows the external and internal signals required by each behaviour.
We can see that wander is a default behaviour, and explore is a default behaviour oriented to the satisfaction of an internal need, and avoid obstacle is a reflex behaviour. Runaway, although it can be seen as a reactive behaviour, it competes with the rest of the behaviours at a motivational level. Reactive behaviours depend mostly on the external signal, but this is sometimes because the motivation is implicit. In this case, safety is a constant parameter, adjusted by the user. The rest of the behaviours are motivated. Approach food, approach water, approach grass, and approach food and water are appetitive behaviours, while eat, drink, and rest are consummatory.
We designed behavioural columns for the behaviours exposed in the previous sections in BeCA by simply setting the values of coupling strengths and connecting BeCA to the perceptual and motor systems and to the internal medium.
Figure 23 shows examples of possible signal trajectories through different blackboard levels in BeCA. The lines show the trajectories of some behavioural columns. Dotted lines indicate potential behavioural columns, that might be consolidated by associative learning (see Section 3.8.1.).
The imitation and induction (I&I) model presented in Section 4.1 is used by the animats to communicate and socialize by imitating and inducing their behaviours.
For example, if animat Paco is hungry, and he is perceiving no food sources, but he is perceiving animat Pepe executing the behaviour "approach food", he will imitate him by approaching to Pepe. Once he perceives the food source Pepe was approaching to, he will approach to it. Induction occurs in a similar way.
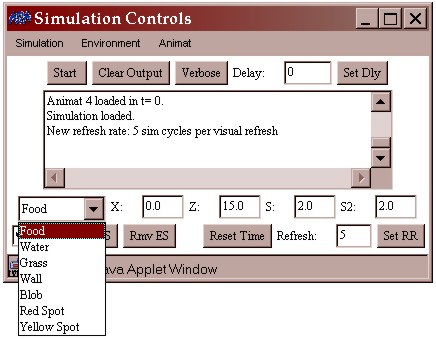
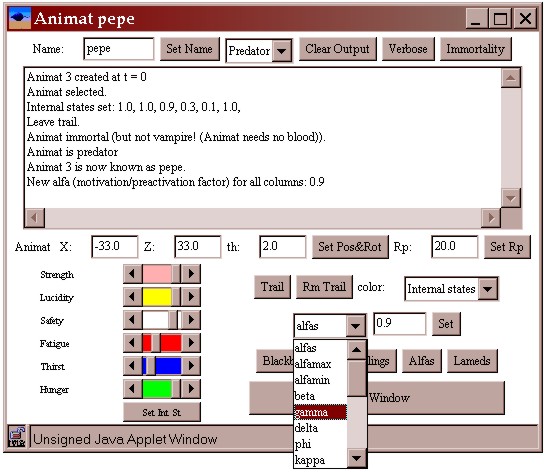
The interface of the BVL allows to perform a wide variety of simulations and experiments. It consists of one window containing the general controls of the BVL and one window for each animat created in the BVL, as the ones shown in Figure 24 and Figure 25.
The general controls window allow the user to save, load, and reset animats, environments, and simulations. Animats are saved with all their properties (internal states, learning states, parameters, and attributes). Simulations handle animats and environments as one. This allows to save initial, partial, or final states of experiments easily. In this window, the user can add and remove external stimuli, randomly or with specific positions and magnitudes; pause and resume the simulation; adjust the refresh rate of the graphics (time steps / step painted); and set a delay for each simulation interval in milliseconds.
In the animat controls window, the user can set the name of the animat, its position and orientation, its radius of perception, and its type (predator or prey). The animat also can be set as immortal (not immoral!). The internal states of the animat are adjusted and shown in the same display, which is a set of scrollbars. The animat can leave a trail, which colour can be also selected to: a specific colour, the animat's colour, or the RGB colour of the magnitudes of fatigue, thirst, and hunger mapped to red, blue, and green, respectively. This allows to visualize the dynamics of the animat's internal states. The parameters alfa, beta, gamma, delta, kappa, lambda, mu, rho, tau, and phi of BeCA; aleph and rp of the perceptual system; and yud, lamed, dalet, and reysh of I&I; can be modified through this interface. Table 3 shows the function of each parameter.
Both controls have a display to inform of the states of the simulation, environment, or animat. The animat controls can display the actual state of the blackboard levels, of the coupling strengths involved in the learning processes, of the alfa's from the intero/extero/drive congruence internal behaviour, and of the lamed's that regulate the imitation of behaviours.
All the presented properties of the BVL allow a wide variety of possibilities in order to produce interesting experiments and simulations.
As with real animals, the animats in the BVL often present non obvious behaviours. But, in difference with real animals, we can easily observe and change the internal states and mechanisms of the animats, providing understanding of their behaviours, and also about adaptive behaviour in animals. This is, not only it provides artificial adaptive behaviour, basing ourselves in ethology, but it gives ethology back a greater understanding of adaptive behaviour and its internal processes.
Our BVL at the present stage may be limited. But indeed it seems that you can never stop counting the small details of animal behaviour you can simulate. For our present purposes, all the properties of the BVL, enhanced by the ones of BeCA and the I&I model, seem to be a good start.
In the next chapter we will present some experiments carried out in our BVL, in order to show and test properties of BeCA, I&I, and our BVL itself.
1. Parts of this chapter are a restructuration of Gershenson, González, and Negrete (2000b).
Carlos Gershenson